


Differences riding outside vs turbo trainer
 12-22-20, 02:16 PM
12-22-20, 02:16 PM
#1
Senior Member
Thread Starter

Differences riding outside vs turbo trainer
Recently I started using a smart trainer for structured workouts and as I was reading about the differences between outdoor and indoor and how it is harder to produce the same power on an indoor trainer as you do outside, I decided to do some calculations to see what is different. Below are some findings.
I have a Wahoo Kickr Core with a flywheel of 12 lbs and an outer radius of 10cm. The gearing to the flywheel has a ratio of 8.5. I then computed some values for a rider on a flat surface producing 250W with a cadence of 95 rpm and speed of 37 km/h. Assuming that we only push down on the pedals over a certain angle, I computed the arc of the power phase and the acceleration/deceleration of the crank in/out of the power phase. Because even though we have a constant cadence of 95 rpm, the pedals are always speeding up when we apply power and slowing down during the dead phase.
What surprised me was that the arc of the power phase is exactly the same for indoor and outdoor. The absolute value of this arc is a bit arbitrary in this model because it depends on the constant force that is applied on the pedals during the power phase.
But the biggest difference is in the acceleration of the crank, on the trainer the angular acceleration of the crank is 3.7 times larger as on the road, both when accelerating in the power phase as when decelerating out of the power phase. This is what makes it more difficult to put the same amount of power down, as it is harder to press on a surface that is accelerating away faster.
I have a Wahoo Kickr Core with a flywheel of 12 lbs and an outer radius of 10cm. The gearing to the flywheel has a ratio of 8.5. I then computed some values for a rider on a flat surface producing 250W with a cadence of 95 rpm and speed of 37 km/h. Assuming that we only push down on the pedals over a certain angle, I computed the arc of the power phase and the acceleration/deceleration of the crank in/out of the power phase. Because even though we have a constant cadence of 95 rpm, the pedals are always speeding up when we apply power and slowing down during the dead phase.
What surprised me was that the arc of the power phase is exactly the same for indoor and outdoor. The absolute value of this arc is a bit arbitrary in this model because it depends on the constant force that is applied on the pedals during the power phase.
But the biggest difference is in the acceleration of the crank, on the trainer the angular acceleration of the crank is 3.7 times larger as on the road, both when accelerating in the power phase as when decelerating out of the power phase. This is what makes it more difficult to put the same amount of power down, as it is harder to press on a surface that is accelerating away faster.
 12-22-20, 04:22 PM
12-22-20, 04:22 PM
#2
Junior Member
Join Date: Dec 2020
Location: Ontario, Canada
Posts: 10
Bikes: 1997 Cannondale R300, 2021 Giant Revolt 1
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 4 Post(s)
Likes: 0
Liked 1 Time
in
1 Post
I have never experienced any difference in power indoors. I think some people are perhaps overheating due to weak (or no) fans and a high house temperature. With one big fan and a house that I try to keep around 19C/66F I haven't had a difference in power. But in the summer months when the house temperature rises a few degrees I feel much weaker indoors. I can typically hit the same intervals but with a much higher perceived exertion.
12-22-20, 07:18 PM
#3
Senior Member
Join Date: Jul 2015
Location: reno, nv
Posts: 2,299
Bikes: yes, i have one
Mentioned: 2 Post(s)
Tagged: 0 Thread(s)
Quoted: 1136 Post(s)
Liked 1,181 Times
in
687 Posts
Recently I started using a smart trainer for structured workouts and as I was reading about the differences between outdoor and indoor and how it is harder to produce the same power on an indoor trainer as you do outside, I decided to do some calculations to see what is different. Below are some findings.
I have a Wahoo Kickr Core with a flywheel of 12 lbs and an outer radius of 10cm. The gearing to the flywheel has a ratio of 8.5. I then computed some values for a rider on a flat surface producing 250W with a cadence of 95 rpm and speed of 37 km/h. Assuming that we only push down on the pedals over a certain angle, I computed the arc of the power phase and the acceleration/deceleration of the crank in/out of the power phase. Because even though we have a constant cadence of 95 rpm, the pedals are always speeding up when we apply power and slowing down during the dead phase.
What surprised me was that the arc of the power phase is exactly the same for indoor and outdoor. The absolute value of this arc is a bit arbitrary in this model because it depends on the constant force that is applied on the pedals during the power phase.
But the biggest difference is in the acceleration of the crank, on the trainer the angular acceleration of the crank is 3.7 times larger as on the road, both when accelerating in the power phase as when decelerating out of the power phase. This is what makes it more difficult to put the same amount of power down, as it is harder to press on a surface that is accelerating away faster.
I have a Wahoo Kickr Core with a flywheel of 12 lbs and an outer radius of 10cm. The gearing to the flywheel has a ratio of 8.5. I then computed some values for a rider on a flat surface producing 250W with a cadence of 95 rpm and speed of 37 km/h. Assuming that we only push down on the pedals over a certain angle, I computed the arc of the power phase and the acceleration/deceleration of the crank in/out of the power phase. Because even though we have a constant cadence of 95 rpm, the pedals are always speeding up when we apply power and slowing down during the dead phase.
What surprised me was that the arc of the power phase is exactly the same for indoor and outdoor. The absolute value of this arc is a bit arbitrary in this model because it depends on the constant force that is applied on the pedals during the power phase.
But the biggest difference is in the acceleration of the crank, on the trainer the angular acceleration of the crank is 3.7 times larger as on the road, both when accelerating in the power phase as when decelerating out of the power phase. This is what makes it more difficult to put the same amount of power down, as it is harder to press on a surface that is accelerating away faster.
DCook87 may have something there, i ride in the garage, very cold this time of year and i never feel like it is harder to generate power compared to inside. summer time, maybe not so much but i try not to ride too much in summer. summer the fan is full blast while in winter it is on the lowest setting and sometimes off.
12-22-20, 08:57 PM
#4
Senior Member
Thread Starter
i'd be curious to know what your calculations are, assuming i can recall any of the math/physics involved. if your pedals are slowing down then i think your cadence is not smooth. pedals should be moving at a constant angular velocity if your cadence is constant *and* smooth. or do i have it wrong?
DCook87 may have something there, i ride in the garage, very cold this time of year and i never feel like it is harder to generate power compared to inside. summer time, maybe not so much but i try not to ride too much in summer. summer the fan is full blast while in winter it is on the lowest setting and sometimes off.
DCook87 may have something there, i ride in the garage, very cold this time of year and i never feel like it is harder to generate power compared to inside. summer time, maybe not so much but i try not to ride too much in summer. summer the fan is full blast while in winter it is on the lowest setting and sometimes off.
In this model I assumed pedaling in squares, so only pushing down, such that 100% of the force is applied over an arc of about 55 deg. In reality we also push pull and lift a little bit, but still most of the power is in that power phase of abot 55 deg. I just wanted to make some simplified assumptions to get an idea where the differences come from.
I also found that with a flywheel weight of about 18kg, assuming the same shape and size, instead of 5.5 kg, the figures would be much closer to outside. However I think it would then become more difficult to control the resistance. At least that is also what I am seeing now when switching to eg 52x113 for my ERG workouts, the Kickr has a much harder time controlling the resistance than when I use the small ring.
12-22-20, 09:11 PM
#5
Senior Member
Thread Starter
I have never experienced any difference in power indoors. I think some people are perhaps overheating due to weak (or no) fans and a high house temperature. With one big fan and a house that I try to keep around 19C/66F I haven't had a difference in power. But in the summer months when the house temperature rises a few degrees I feel much weaker indoors. I can typically hit the same intervals but with a much higher perceived exertion.
That is also the purpose of the flywheel, to absorb the loss of power in the dead parts of the pedal stroke. It is just not keeping the speed as constant as we experience outside when our bodyweight takes care of that.
12-22-20, 09:16 PM
#6
Full Member
Drag is not constant, the electronic resistance of the trainer varies during the pedal stroke, it is controlled by the trainer electronics to mimic a much larger mass than the flywheel alone. So the flywheel will not spin up as fast as a unrestrained mass, and not slow down as fast either. The change in resistance is included the the power calculation. I heard that the advanced trainers will incorporate the mass of the rider in the resistance calculation so that the feel is different for a heavy or light rider.
12-22-20, 09:32 PM
#7
Senior Member
Join Date: Jul 2015
Location: reno, nv
Posts: 2,299
Bikes: yes, i have one
Mentioned: 2 Post(s)
Tagged: 0 Thread(s)
Quoted: 1136 Post(s)
Liked 1,181 Times
in
687 Posts
So I am assuming a constant speed and constant cadence. However, the acceleration and deceleration is because we are not able to apply constant force on the pedals all way round the pedal stroke, while the drag forces is constant through time. Therefore when we are not pushing the pedals we are slowing down, while in the power phase we are speeding up, even when going at a �constant� speed and cadence.
In this model I assumed pedaling in squares, so only pushing down, such that 100% of the force is applied over an arc of about 55 deg. In reality we also push pull and lift a little bit, but still most of the power is in that power phase of abot 55 deg. I just wanted to make some simplified assumptions to get an idea where the differences come from.
I also found that with a flywheel weight of about 18kg, assuming the same shape and size, instead of 5.5 kg, the figures would be much closer to outside. However I think it would then become more difficult to control the resistance. At least that is also what I am seeing now when switching to eg 52x113 for my ERG workouts, the Kickr has a much harder time controlling the resistance than when I use the small ring.
In this model I assumed pedaling in squares, so only pushing down, such that 100% of the force is applied over an arc of about 55 deg. In reality we also push pull and lift a little bit, but still most of the power is in that power phase of abot 55 deg. I just wanted to make some simplified assumptions to get an idea where the differences come from.
I also found that with a flywheel weight of about 18kg, assuming the same shape and size, instead of 5.5 kg, the figures would be much closer to outside. However I think it would then become more difficult to control the resistance. At least that is also what I am seeing now when switching to eg 52x113 for my ERG workouts, the Kickr has a much harder time controlling the resistance than when I use the small ring.
i have a 53x12 so we are pretty close. i don't think the kicker knows what gear you are in. there is no interface for that in ANT+ spec for that. it can't even deduce it and is not something that is reports. it really only knows the applied torque at the hub, rpm, and time.
i'll take your word if you are good at the math. i just don't feel a difference.
Likes For spelger:
12-22-20, 09:50 PM
#8
Senior Member
Thread Starter
Drag is not constant, the electronic resistance of the trainer varies during the pedal stroke, it is controlled by the trainer electronics to mimic a much larger mass than the flywheel alone. So the flywheel will not spin up as fast as a unrestrained mass, and not slow down as fast either. The change in resistance is included the the power calculation. I heard that the advanced trainers will incorporate the mass of the rider in the resistance calculation so that the feel is different for a heavy or light rider.
I think that is what they mean at Tacx when they say to have a simulated flywheel.
The trainer would need to adjust the resistance very fast, I was just not seeing that judging by the lags in the resistance adjustment in ERG mode on the Wahoo?
Last edited by mr_pedro; 12-22-20 at 09:55 PM.
12-22-20, 10:33 PM
#9
Full Member
Well a trainer can certainly change the resistance quickly as demonstrated by the road feel on a Neo and the shifting bump through the pedals on the Kickr bike. I don't have any links, might be hearsay, possibly something I read on a technical review of a high end trainer. ERG mode lag for me is due to the software trying to estimate how much you are going to overshoot on your attempt to keep a constant power output and cadence. Without shifting gears your output torque and cadence increase at the same time while the trainer is trying to adjust resistance to be constant power so it has to guess how much to increase resistance so cadence slows more than torque. I have no issues with erg mode especially when running a high flywheel speed, other people never get ERG to work probably due to being out of sync with the software adjustment algorithm. I ran a Kickr V2 for 4 years and now a Kickr bike.
12-22-20, 11:23 PM
#10
Senior Member
Join Date: Jul 2015
Location: reno, nv
Posts: 2,299
Bikes: yes, i have one
Mentioned: 2 Post(s)
Tagged: 0 Thread(s)
Quoted: 1136 Post(s)
Liked 1,181 Times
in
687 Posts
Well a trainer can certainly change the resistance quickly as demonstrated by the road feel on a Neo and the shifting bump through the pedals on the Kickr bike. I don't have any links, might be hearsay, possibly something I read on a technical review of a high end trainer. ERG mode lag for me is due to the software trying to estimate how much you are going to overshoot on your attempt to keep a constant power output and cadence. Without shifting gears your output torque and cadence increase at the same time while the trainer is trying to adjust resistance to be constant power so it has to guess how much to increase resistance so cadence slows more than torque. I have no issues with erg mode especially when running a high flywheel speed, other people never get ERG to work probably due to being out of sync with the software adjustment algorithm. I ran a Kickr V2 for 4 years and now a Kickr bike.
12-23-20, 12:19 AM
#11

Senior Member
Join Date: Jun 2008
Location: Vancouver, BC
Posts: 9,201
Mentioned: 11 Post(s)
Tagged: 0 Thread(s)
Quoted: 1186 Post(s)
Liked 289 Times
in
177 Posts
I think there’s an adjustment period when you start riding a trainer. It definitely feels different and takes your leg muscles a while to adapt but your factor of 3.7 is in comparison to a rider going 37kph. Climbing a hill, the speed and inertial load is much lower. Most riders don’t have a problem putting out their best power on a hill, so ultimately I don’t thing the lower inertial load on a trainer holds anyone back. Cooling is probably the biggest factor as mentioned earlier. It’s difficult to reproduce the amount of cooling one gets while riding 30+kph.
I don’t think the kickr does any dynamic simulation of inertia otherwise they wouldn’t keep making their flywheel bigger. Tacx has a simulated flywheel.
I don’t think the kickr does any dynamic simulation of inertia otherwise they wouldn’t keep making their flywheel bigger. Tacx has a simulated flywheel.
Likes For gregf83:
12-23-20, 12:23 AM
#12
Senior Member
Join Date: Jun 2008
Location: Vancouver, BC
Posts: 9,201
Mentioned: 11 Post(s)
Tagged: 0 Thread(s)
Quoted: 1186 Post(s)
Liked 289 Times
in
177 Posts
If you use a powermeter to control the power there is definitely a lag in resistance with changes in cadence on the kickr if you�re running zwift. It averages out during an interval but the power recorded is not constant during an interval.
12-23-20, 02:49 AM
#13
Senior Member
Thread Starter
Well a trainer can certainly change the resistance quickly as demonstrated by the road feel on a Neo and the shifting bump through the pedals on the Kickr bike. I don't have any links, might be hearsay, possibly something I read on a technical review of a high end trainer. ERG mode lag for me is due to the software trying to estimate how much you are going to overshoot on your attempt to keep a constant power output and cadence. Without shifting gears your output torque and cadence increase at the same time while the trainer is trying to adjust resistance to be constant power so it has to guess how much to increase resistance so cadence slows more than torque. I have no issues with erg mode especially when running a high flywheel speed, other people never get ERG to work probably due to being out of sync with the software adjustment algorithm. I ran a Kickr V2 for 4 years and now a Kickr bike.
Anyway I can imagine that companies don�t disclose to much what they are doing in these proprietary systems that determine road feel of their product.
ERG mode works good enough, I use Trainer Road, so I get a clear graph comparing measured power to target. It is just a bit more wobbly on the big ring compared to the small ring.
12-23-20, 04:38 AM
#14
Senior Member
Thread Starter
I think there�s an adjustment period when you start riding a trainer. It definitely feels different and takes your leg muscles a while to adapt but your factor of 3.7 is in comparison to a rider going 37kph. Climbing a hill, the speed and inertial load is much lower. Most riders don�t have a problem putting out their best power on a hill, so ultimately I don�t thing the lower inertial load on a trainer holds anyone back. Cooling is probably the biggest factor as mentioned earlier. It�s difficult to reproduce the amount of cooling one gets while riding 30+kph.
I don�t think the kickr does any dynamic simulation of inertia otherwise they wouldn�t keep making their flywheel bigger. Tacx has a simulated flywheel.
I don�t think the kickr does any dynamic simulation of inertia otherwise they wouldn�t keep making their flywheel bigger. Tacx has a simulated flywheel.
Perhaps the difficulties on the trainer are the same as when going from riding on the flats to climbing. When in the hills the crank slows down more outside of the power zone, you need to recruit more of the other muscles you are not used to. This is also because the pedal also accelerates more in the power zone which prevents you from using the main muscles as much as you would want.
12-23-20, 07:45 AM
#15
Senior Member
Join Date: Jul 2015
Location: reno, nv
Posts: 2,299
Bikes: yes, i have one
Mentioned: 2 Post(s)
Tagged: 0 Thread(s)
Quoted: 1136 Post(s)
Liked 1,181 Times
in
687 Posts
are you referring to ERG mode? or free ride mode? the two are not remotely the same. teh kicker does fine in ERG mode albeit i know there is about a 3 second delay when changing different target powers. this i have measured by log file inspection. once target power is reached it does quite well. but the subtleties of a free ride are tough to detect unless the grade changes greatly.
12-23-20, 09:20 AM
#16
Senior Member
Thread Starter
are you referring to ERG mode? or free ride mode? the two are not remotely the same. teh kicker does fine in ERG mode albeit i know there is about a 3 second delay when changing different target powers. this i have measured by log file inspection. once target power is reached it does quite well. but the subtleties of a free ride are tough to detect unless the grade changes greatly.
Using a third party power meter to control the trainer is called power matching and there are two options to do that with the Wahoo: 1) For example in Zwift you can connect to both the power meter and the trainer and let Zwift do the power matching. 2) Or you can go into the Wahoo settings and connect to the power meter, this will let the trainer do the power matching and Zwift only connects to the thrainer.
The second option for me shows more stable figures when doing a work out in ERG mode. As I let the flywheel spin faster by selecting a longer gear, I notice more instability in matching to the target power.
12-23-20, 10:55 AM
#17
Senior Member
Join Date: Jun 2008
Location: Vancouver, BC
Posts: 9,201
Mentioned: 11 Post(s)
Tagged: 0 Thread(s)
Quoted: 1186 Post(s)
Liked 289 Times
in
177 Posts
are you referring to ERG mode? or free ride mode? the two are not remotely the same. teh kicker does fine in ERG mode albeit i know there is about a 3 second delay when changing different target powers. this i have measured by log file inspection. once target power is reached it does quite well. but the subtleties of a free ride are tough to detect unless the grade changes greatly.
 12-23-20, 10:38 PM
12-23-20, 10:38 PM
#18
Senior Member
Thread Starter
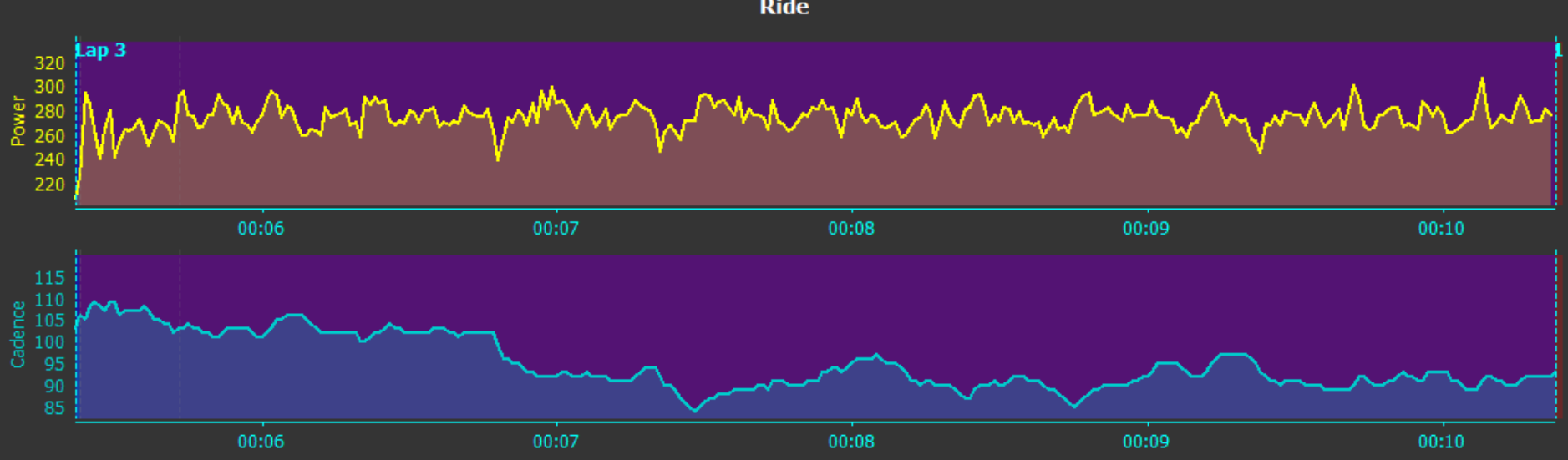
Here is my power when running in Erg mode and using the powermeter to control the power in zwift. If I use the Kickr to control the power the power reported to zwift looks very smooth but the power recorded from the powermeter still bounces around as shown below. It's not a big deal as the average for the interval is correct.
What should help is picking a lower gear.
12-24-20, 03:57 PM
#19
Senior Member
Join Date: Jul 2015
Location: reno, nv
Posts: 2,299
Bikes: yes, i have one
Mentioned: 2 Post(s)
Tagged: 0 Thread(s)
Quoted: 1136 Post(s)
Liked 1,181 Times
in
687 Posts
That�s in ERG mode, because then you have a target power and can clearly see how fast and how stable it stays around that value.
Using a third party power meter to control the trainer is called power matching and there are two options to do that with the Wahoo: 1) For example in Zwift you can connect to both the power meter and the trainer and let Zwift do the power matching. 2) Or you can go into the Wahoo settings and connect to the power meter, this will let the trainer do the power matching and Zwift only connects to the thrainer.
The second option for me shows more stable figures when doing a work out in ERG mode. As I let the flywheel spin faster by selecting a longer gear, I notice more instability in matching to the target power.
Using a third party power meter to control the trainer is called power matching and there are two options to do that with the Wahoo: 1) For example in Zwift you can connect to both the power meter and the trainer and let Zwift do the power matching. 2) Or you can go into the Wahoo settings and connect to the power meter, this will let the trainer do the power matching and Zwift only connects to the thrainer.
The second option for me shows more stable figures when doing a work out in ERG mode. As I let the flywheel spin faster by selecting a longer gear, I notice more instability in matching to the target power.
i do not have a power meter so i cannot even try this feature. when i do my own trainings in ERG mode my power graphs are always smooth because the trainer always has immediate access to the power data even if packets being sent to the display are dropped from time to time and this will always be the case (more below).
Here is my power when running in Erg mode and using the powermeter to control the power in zwift. If I use the Kickr to control the power the power reported to zwift looks very smooth but the power recorded from the powermeter still bounces around as shown below. It's not a big deal as the average for the interval is correct. I haven't tried the powermatch feature mentioned by mr_pedro as I believe that is only available in the iOS version of the Kickr app and I'm using an android phone.
you also might be experiencing some packet loss with your cadence sensor. i see areas where the cadence is not changing for about 10 seconds. i used to put my sensor on my shoe and had this problem too. then i moved it to the crank and all that went away. it still happens from time to time but not as much as it used to. if already on your crank then maybe there is just some RF interference causing packet loss. microwave ovens are famous for this, older ones can leak a bit and they operate right in that RF spectrum.
the kicker does not transmit averaged data. it transmits instantaneous power and torque data once every ~1/4 second. as an ANT+ developer i can assure you of this. the smoothing you are seeing is very likely the application you are using. in my won app i apply a 2 second running average, it smooths things out ever so slightly. i think it is common for garmin displays to apply a 3 second running average for similar reasons. those huge power swings don't really tell you much.
12-24-20, 05:13 PM
#20
Senior Member
Join Date: Jun 2008
Location: Vancouver, BC
Posts: 9,201
Mentioned: 11 Post(s)
Tagged: 0 Thread(s)
Quoted: 1186 Post(s)
Liked 289 Times
in
177 Posts
i did a bit of reading to see what this "power match" is all about. while technically a neat feature i don't really get why anyone would use it except for the connection problems that it overcomes for some. maybe a valid reason is to have all power data from a single device, but that comes at a cost.
what are the units of that chart's x axis? minutes or seconds? i'm going to guess minutes since there appears to be about 60 transitions from 6 to 7. i'm also going to guess that this is a graph of a training session with a target power of 270 watts.
if the power data is from some other remote device then this would not surprise me at all if it does not quite feel right.
you also might be experiencing some packet loss with your cadence sensor. i see areas where the cadence is not changing for about 10 seconds.
12-24-20, 10:19 PM
#21
just another gosling
Join Date: Feb 2007
Location: Everett, WA
Posts: 19,528
Bikes: CoMo Speedster 2003, Trek 5200, CAAD 9, Fred 2004
Mentioned: 115 Post(s)
Tagged: 0 Thread(s)
Quoted: 3886 Post(s)
Liked 1,938 Times
in
1,383 Posts
This materials under discussion in this thread are certainly complicated and fraught. I've been riding the same set of resistance rollers indoors for over 20 years. I don't notice any difference in the feel between riding them and riding outdoors on the flat. On hills there is a definite difference due to the crank inertial load issue discussed in a previous comment. I've always been puzzled when reading of riders' desire for a trainer which simulated road feel. My rollers perfectly simulate road feel because I've not adjusted or purchased the correct trainer, but rather have trained myself so that my legs feel the same resistance throughout the pedal stroke in either environment. I have tried trainers and found no difference there either.
It's simple: I've trained myself to apply a constant torque to the crank throughout the pedal stroke. Not a constant torque on each individual crank, which is what some people imagine "pedaling circles" to be, but rather keeping the sum of the crank torques even. That causes the cranks to rotate at a constant angular rate. There are limits to this of course because different muscles have different maximum strengths, so for me that begins to break down somewhere above FTP.
I've been doing this for a long time but usually never at a perfect steady state for more than an hour. Lately, I've been doing 75% FTP for a steady 2 hours, though I stop for a few seconds for a water break every 15' or 30' depending. When I started stretching out the time, I had some serious soreness in my hip flexors, upper quads, and even lower abs, from lifting my leg and maybe a bit of pedal on the backstroke. I try to stay in contact with some part of the shoe all the way around, keeping some positive pedal pressure tangent to the pedal circle, though that pressure varies a lot going around the circle..
Some of you long-time posters might recall the famous debunking of the efficacy of Powercranks by one rider, who rode just the same whether with or without them, and thus found them of no value. I'm working on being able to find them of no value, though of course I've never tried them. This new thing for me has been very interesting, enough to hold my interest for 2 hours of listening to "classic rock" while turning the pedals and staying on the rollers. My resistance unit's power curve comes very close to duplicating my speed on the rollers and road at the same power, so that's nice.
So IMO the OPs calculation is very interesting and I'm sure was fun to do, but it's really not applicable, or shouldn't be. I realize that there are fans of only hammering the downstroke on BF. I've gone the opposite way and it's worked out for me very well over the decades. I have several variations to my pedal stroke so that I can change the emphasis on different muscles or their range of motion under contraction. That spreads out the work load and keeps actual pain from intruding on the fun. I just go by my PM hub and don't worry about anything else. That makes everything really simple and the training effect possible to achieve indoors a direct transfer to the road.
It's simple: I've trained myself to apply a constant torque to the crank throughout the pedal stroke. Not a constant torque on each individual crank, which is what some people imagine "pedaling circles" to be, but rather keeping the sum of the crank torques even. That causes the cranks to rotate at a constant angular rate. There are limits to this of course because different muscles have different maximum strengths, so for me that begins to break down somewhere above FTP.
I've been doing this for a long time but usually never at a perfect steady state for more than an hour. Lately, I've been doing 75% FTP for a steady 2 hours, though I stop for a few seconds for a water break every 15' or 30' depending. When I started stretching out the time, I had some serious soreness in my hip flexors, upper quads, and even lower abs, from lifting my leg and maybe a bit of pedal on the backstroke. I try to stay in contact with some part of the shoe all the way around, keeping some positive pedal pressure tangent to the pedal circle, though that pressure varies a lot going around the circle..
Some of you long-time posters might recall the famous debunking of the efficacy of Powercranks by one rider, who rode just the same whether with or without them, and thus found them of no value. I'm working on being able to find them of no value, though of course I've never tried them. This new thing for me has been very interesting, enough to hold my interest for 2 hours of listening to "classic rock" while turning the pedals and staying on the rollers. My resistance unit's power curve comes very close to duplicating my speed on the rollers and road at the same power, so that's nice.
So IMO the OPs calculation is very interesting and I'm sure was fun to do, but it's really not applicable, or shouldn't be. I realize that there are fans of only hammering the downstroke on BF. I've gone the opposite way and it's worked out for me very well over the decades. I have several variations to my pedal stroke so that I can change the emphasis on different muscles or their range of motion under contraction. That spreads out the work load and keeps actual pain from intruding on the fun. I just go by my PM hub and don't worry about anything else. That makes everything really simple and the training effect possible to achieve indoors a direct transfer to the road.
__________________
Results matter
Results matter
 12-25-20, 12:41 AM
12-25-20, 12:41 AM
#22
Senior Member
Thread Starter
[...]
It's simple: I've trained myself to apply a constant torque to the crank throughout the pedal stroke. Not a constant torque on each individual crank, which is what some people imagine "pedaling circles" to be, but rather keeping the sum of the crank torques even. That causes the cranks to rotate at a constant angular rate. There are limits to this of course because different muscles have different maximum strengths, so for me that begins to break down somewhere above FTP.
[...]
So IMO the OPs calculation is very interesting and I'm sure was fun to do, but it's really not applicable, or shouldn't be.
It's simple: I've trained myself to apply a constant torque to the crank throughout the pedal stroke. Not a constant torque on each individual crank, which is what some people imagine "pedaling circles" to be, but rather keeping the sum of the crank torques even. That causes the cranks to rotate at a constant angular rate. There are limits to this of course because different muscles have different maximum strengths, so for me that begins to break down somewhere above FTP.
[...]
So IMO the OPs calculation is very interesting and I'm sure was fun to do, but it's really not applicable, or shouldn't be.
The ride feel of a trainer or roller and how much it resembles outside riding is dependent on these accelerations. Compared to riding outside on a flat, trainers will typically accelerate faster when you are pushing down on the pedals and decelerate faster as well when in the dead spots.
Are you familiar with the peanut plots? At best these become sausages if you become smoother, but never circles:
https://support.wattbike.com/hc/en-g...fect-Pedalling
And yes these calculations were fun to do, which was at least as big a driver as any practical importance that could come of it
 12-25-20, 01:02 AM
12-25-20, 01:02 AM
#23
Senior Member
Thread Starter
i did a bit of reading to see what this "power match" is all about. while technically a neat feature i don't really get why anyone would use it except for the connection problems that it overcomes for some. maybe a valid reason is to have all power data from a single device, but that comes at a cost. in either ERG mode or simulation mode there will always be a delay between the power meter and the trainer being controlled *and* the trainer will need to handle lost data packets. that will not go away.
i do not have a power meter so i cannot even try this feature. when i do my own trainings in ERG mode my power graphs are always smooth because the trainer always has immediate access to the power data even if packets being sent to the display are dropped from time to time and this will always be the case (more below).
i do not have a power meter so i cannot even try this feature. when i do my own trainings in ERG mode my power graphs are always smooth because the trainer always has immediate access to the power data even if packets being sent to the display are dropped from time to time and this will always be the case (more below).
the kicker does not transmit averaged data. it transmits instantaneous power and torque data once every ~1/4 second. as an ANT+ developer i can assure you of this. the smoothing you are seeing is very likely the application you are using. in my won app i apply a 2 second running average, it smooths things out ever so slightly. i think it is common for garmin displays to apply a 3 second running average for similar reasons. those huge power swings don't really tell you much.

On the third work interval, I switched to little ring for the first quarter, then the power wiggle is me moving up the gears again and spinning up the flywheel. So clearly ERG has a harder time with faster spinning flywheel but for me still works fairly well.
12-25-20, 01:11 AM
#24
Senior Member
Thread Starter
 12-25-20, 07:20 PM
12-25-20, 07:20 PM
#25
just another gosling
Join Date: Feb 2007
Location: Everett, WA
Posts: 19,528
Bikes: CoMo Speedster 2003, Trek 5200, CAAD 9, Fred 2004
Mentioned: 115 Post(s)
Tagged: 0 Thread(s)
Quoted: 3886 Post(s)
Liked 1,938 Times
in
1,383 Posts
What you are describing is the balancing of left right. What is happening as the pedals go round is that every foot has a phase when it is applying tangental force to the pedal in the right direction and a phase of no force or even negative force if you don't take the weight off when the pedal goes up. If we add up the torque provided by both legs, the resulting torque is never smooth. So when you go at a constant speed and cadence, the crank is always accelerating when torque is high and decelerating when torque is low, no matter how smooth it feels to you.
The ride feel of a trainer or roller and how much it resembles outside riding is dependent on these accelerations. Compared to riding outside on a flat, trainers will typically accelerate faster when you are pushing down on the pedals and decelerate faster as well when in the dead spots.
Are you familiar with the peanut plots? At best these become sausages if you become smoother, but never circles:
https://support.wattbike.com/hc/en-g...fect-Pedalling
And yes these calculations were fun to do, which was at least as big a driver as any practical importance that could come of it
The ride feel of a trainer or roller and how much it resembles outside riding is dependent on these accelerations. Compared to riding outside on a flat, trainers will typically accelerate faster when you are pushing down on the pedals and decelerate faster as well when in the dead spots.
Are you familiar with the peanut plots? At best these become sausages if you become smoother, but never circles:
https://support.wattbike.com/hc/en-g...fect-Pedalling
And yes these calculations were fun to do, which was at least as big a driver as any practical importance that could come of it
You push down on the downstroke while unweighting the upstroke pedal, so torque 1. You pull back at the bottom at the same time as you push forward at the top, torque 2. All one has to do is to make those 2 torques equal. Then all that's left is filling in the corners which is quite natural. Rollers are touted as stroke smoothers because the rotating weight is so small. My rollers even have poly drums, very light. So the inertia in the system is low, which means one can hear the slightest variation in torque because then the roller speed changes and thus the sound of the whir also changes. It's very noticeable and enables active feedback.
In your link, the "elite" pedaler is not starting his downstroke early enough, They should be pushing harder through the top and starting the downstroke at 1 o'clock. At the bottom, they are not converting their downstroke to a rearward motion and continuing that rearward motion through the bottom by contracting their hamstring and glute. It's really very simple, not complicated at all, but it does require a period of neuromuscular training which in turn leads to increasing the strength of the involved muscles.
The full stroke pattern involves lifting the toe before the top of the stroke, putting pressure on the heel as the pedal goes over he top, converting that to the downstroke, adding pressure to the heel cup as the pedal nears the bottom, pulling the pedal through the bottom and up the backstroke 20�-30�. Looking at that graph, you can see how doing those simple things fills in those low spots. I doubt that it's possible to get the feel for this on a trainer with a large flywheel, but maybe. You could try pedaling at 115-120 cadence at a very low power - if it'll even go that low - for long periods, 15'-45', using only the shoe's uppers, leaving a layer of air between the bottoms of one's feet and the insole, keeping the feet flat and wiggling the toes. That's how one starts out on the journey toward pedaling salvation.
 After one can do that, one starts to work on the subtleties of foot pressure in the shoe.
After one can do that, one starts to work on the subtleties of foot pressure in the shoe.None of this makes much difference for the usual short workouts and races. However the smoothest pedaler I've ever ridden with was the first American finisher in RAAM a few years ago. Most randonneurs have a very smooth high cadence style.
__________________
Results matter
Results matter