


Bike Computer Accuracy
 01-28-21, 02:35 PM
01-28-21, 02:35 PM
#51
Senior Member
Join Date: Apr 2020
Location: Zurich, Switzerland
Posts: 877
Mentioned: 1 Post(s)
Tagged: 0 Thread(s)
Quoted: 528 Post(s)
Liked 230 Times
in
161 Posts
If I remember back when I used Wahoo on my phone and my bike computer they were always just a few hundred metres off after such a distance. I.e. less than 1%. 2% is quite a lot if you think about it.

Likes For ZHVelo:
01-28-21, 03:49 PM
#52
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
The wheel sensor will be more accurate over longer distances too (as long as the circumference is accurate).
The GPS distance will be shorter (by a bit) for a curvy path than the wheel sensor because the GPS is measuring straight lines every 1 second while the wheel sensor is measuring straight lines every 0.33 seconds.
The GPS distance will be shorter (by a bit) for a curvy path than the wheel sensor because the GPS is measuring straight lines every 1 second while the wheel sensor is measuring straight lines every 0.33 seconds.
Last edited by njkayaker; 01-28-21 at 03:58 PM.
Likes For njkayaker:
01-28-21, 04:13 PM
#53
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
The wheel sensor will be more accurate over longer distances too (as long as the circumference is accurate).
The GPS distance will be shorter (by a bit) for a curvy path than the wheel sensor because the GPS is measuring straight lines every 1 second while the wheel sensor is measuring straight lines every 0.33 seconds.
The GPS distance will be shorter (by a bit) for a curvy path than the wheel sensor because the GPS is measuring straight lines every 1 second while the wheel sensor is measuring straight lines every 0.33 seconds.
01-28-21, 04:29 PM
#54
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
Even though it's "not a serious issue" (I said it was a bit), it means GPS won't be more accurate.
GPS also has issues with reception, which has more opportunity to happen over longer distances.
Garmin prefers the distance and speed from the sensor over that from GPS. They aren't doing that because the sensor is less accurate.
Last edited by njkayaker; 01-28-21 at 04:46 PM.
01-28-21, 04:46 PM
#55
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
GPS also has issues with reception, which has more opportunity to happen over longer distances.
Garmin prefers the distance and speed from the sensor over that from GPS. They aren't doing that because the sensor is less accurate.
01-28-21, 04:55 PM
#56
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
And the error for a wheel sensor is much less (centimeters versus feet for GPS).
The weakness of the wheel sensor is the need for an accurate circumference and for the circumference to be stable.
Losing the magnet isn't normal. It's rare that that happens. It's more like losing the GPS.
No. Because they don't have to use it for distance when they are using it for speed.
Last edited by njkayaker; 01-28-21 at 05:12 PM.
01-28-21, 05:54 PM
#57
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
A similar situation exists with the measurement of elevation changes. Pressure transducers work much better than GPS in the short term, but GPS works better in the long term. Why? Because they suffer from different types of errors, and those errors accumulate differently.
01-29-21, 08:52 AM
#58
Senior Member
Join Date: Dec 2010
Location: northern Deep South
Posts: 8,904
Bikes: Fuji Touring, Novara Randonee
Mentioned: 36 Post(s)
Tagged: 0 Thread(s)
Quoted: 2604 Post(s)
Liked 1,933 Times
in
1,213 Posts
Yes, a wheel sensor has lower error, for a single measurement. But you don't seem to understand that the errors are very different in character, so they accumulate differently. It is incorrect to simply say "this has less single-shot error, therefore it is better at all distances."
The GPS has both systemic and random errors. One sigma random error on GPS location is about +/- 30 feet at an unobstructed (no trees or overpasses) or multipath (no tall buildings or steel bridges nearby) location. It's possible to do some post-processing to affect how that random error accumulates, but that processing can result in a computed path that's either longer or shorter than the real path taken by the device.
The GPS also has systemic error. That happens when your route includes turns or curves, and the magnitude depends on where the periodic location measurements are take, the error in location for each points, and how the post-processing smooths out the computed path. If you ride where there are trees, buildings, bridges, or tunnels, you've got another systemic error of unknown magnitude. As a practical matter, it's a systemic error that's random, and sometimes significant in magnitude.
The GPS result for many of my rides, at least, is that measurements of the distance traveled (and subsequently the speed) is usually smaller than the actual, although the systemic multipath error can make it larger than the actual distance. If I don't have a wheel sensor measuring how far I really ride, the GPS only measurement error is unknown, and the rate of error accumulation is unknown. But I can be fairly certain the GPS measurement is wrong, I just don't know whether the error is positive or negative, or how large it is.
A similar situation exists with the measurement of elevation changes. Pressure transducers work much better than GPS in the short term, but GPS works better in the long term. Why? Because they suffer from different types of errors, and those errors accumulate differently.
Likes For pdlamb:
01-29-21, 09:45 AM
#59
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
Yes, a wheel sensor has lower error, for a single measurement. But you don't seem to understand that the errors are very different in character, so they accumulate differently. It is incorrect to simply say "this has less single-shot error, therefore it is better at all distances."
Since tires lose pressure over time, the circumference gets smaller. So, there's that issue with wheel sensors. But it's not clear how much that matters.
Nothing you've said is any support for GPS being better than using a wheel sensor. Keep in mind that we are talking about cycling (something with low speeds and, generally, short distances). And, we are talking about GPS as it's used in devices used by cyclists (which don't use things like WAAS).
A similar situation exists with the measurement of elevation changes. Pressure transducers work much better than GPS in the short term, but GPS works better in the long term. Why? Because they suffer from different types of errors, and those errors accumulate differently.
Elevation has other issues. GPS favors horizontal location and errors at the level of 30 feet don't matter that much for that. For elevation gain (which is what most cyclists are interested in), GPS is a poor way to measure it.
===========================
Garmin prefers the distance and speed from the sensor over that from GPS. They aren't doing that because the sensor is less accurate. They use if for distance and speed (when they have the option of using one or the other separately).
You have to explain why this company (presumably, having some expertise) does this.
Last edited by njkayaker; 01-29-21 at 10:05 AM.
01-29-21, 09:58 AM
#60
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
Elevation measurement for a GPS is similar to location measurement, only it's about three times larger. The only errors you'll see for pressure transducers are mis-compensated temperature differentials or barometric pressure changes with weather. If you're on tour, you can turn on the GPS and let is settle for perhaps 5 minutes before riding to get a good starting altitude, if you care. For my money, I'd bet on barometric sensors for more accurate climbing readings any time except when a major front comes through during the ride. But when a front comes through, the weather usually concerns me much more than the climb measurement accuracy.
The Edges let you "calibrate" the barometer but I think that only affects absolute elevation numbers (which cyclists are not typically interested in) and doesn't affect gain (since that's the result of a difference).
Measuring gain has other issues beyond issues with measuring absolute elevation.
I've tried but haven't been able to determine how much it changes the gain value.
Last edited by njkayaker; 01-29-21 at 10:04 AM.
01-29-21, 10:13 AM
#61
Senior Member
Join Date: Nov 2019
Posts: 701
Mentioned: 1 Post(s)
Tagged: 0 Thread(s)
Quoted: 347 Post(s)
Liked 418 Times
in
250 Posts
This thread has made me think about my Garmin. Ever since the 705 I’ve used ‘auto-calibration’ for the wheel size. I assumed that it counts wheel revolutions and compared it the to GPS and used this number as the circumference. But does anyone know exactly how this feature works? Does it do it continuously, once an hour, once a ride, only durning a setup? How many wheel revolutions does it use?
Garmin says entering it manually can be more accurate for speed and distance, but I honestly don’t really care that much. I can always find the real speed and distance post ride if I’m that interested.
Garmin says entering it manually can be more accurate for speed and distance, but I honestly don’t really care that much. I can always find the real speed and distance post ride if I’m that interested.
01-29-21, 10:17 AM
#62
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
This thread has made me think about my Garmin. Ever since the 705 I�ve used �auto-calibration� for the wheel size. I assumed that it counts wheel revolutions and compared it the to GPS and used this number as the circumference. But does anyone know exactly how this feature works? Does it do it continuously, once an hour, once a ride, only durning a setup? How many wheel revolutions does it use?
It gets the distance from GPS and calculates the wheel circumference based on the number of wheel rotations that occur during the time of the measurement.
Likes For njkayaker:
01-29-21, 02:34 PM
#63
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
The wheel sensor has systemic systematic error which is dependent on calibration, and is highly repeatable. For example, my wheel sensor may read 0.5% low. Over 10 miles, it will read 0.05 miles short; over 50 miles, it'll read 0.25 miles short. That won't be affected by route, obstructions, multipath, or anything else. It'll only be affected by how far you skid or how far you're airborne with your wheel stopped, or by wobbles in the wheel path -- but even then, it'll be an accurate measure of how far the wheel travels.
The GPS has both systemic systematic and random errors.
It's possible to do some post-processing to affect how that random error accumulates, but that processing can result in a computed path that's either longer or shorter than the real path taken by the device.
The GPS also has systemic systematic error. That happens when your route includes turns or curves, and the magnitude depends on where the periodic location measurements are take, the error in location for each points, and how the post-processing smooths out the computed path. If you ride where there are trees, buildings, bridges, or tunnels, you've got another systemic systematic error of unknown magnitude. As a practical matter, it's a systemic systematic error that's random, and sometimes significant in magnitude.
The GPS result for many of my rides, at least, is that measurements of the distance traveled (and subsequently the speed) is usually smaller than the actual, although the systemic systematic multipath error can make it larger than the actual distance.
If I don't have a wheel sensor measuring how far I really ride, the GPS only measurement error is unknown, and the rate of error accumulation is unknown. But I can be fairly certain the GPS measurement is wrong, I just don't know whether the error is positive or negative, or how large it is.
Elevation measurement for a GPS is similar to location measurement, only it's about three times larger. The only errors you'll see for pressure transducers are mis-compensated temperature differentials or barometric pressure changes with weather. If you're on tour, you can turn on the GPS and let is settle for perhaps 5 minutes before riding to get a good starting altitude, if you care. For my money, I'd bet on barometric sensors for more accurate climbing readings any time except when a major front comes through during the ride. But when a front comes through, the weather usually concerns me much more than the climb measurement accuracy.
One sigma random error on GPS location is about +/- 30 feet at an unobstructed (no trees or overpasses) or multipath (no tall buildings or steel bridges nearby) location.
Errors in the absolute position come from several sources, including ionospheric effects, timing errors, multipath signals, reference clock drift, ephemeris errors, etc. Luckily, however, the largest contributors to the error budget are slowly varying effects, which means they essentially become common mode errors for closely spaced measurements. In other words, two adjacent positions may be off by 5 m, but they're both off by the same amount in the same direction. That's why your GPS computer does not show you bouncing around � 5 m every second when you're sitting at a stop light. It might put your position a few meters off the road, or partially into the intersection, but the point-to-point position is relatively stable. As a consequence, the distance calculated between two adjacent points will have an uncertainty much less (about 0.5 m) than the absolute uncertainty of the GPS readings.
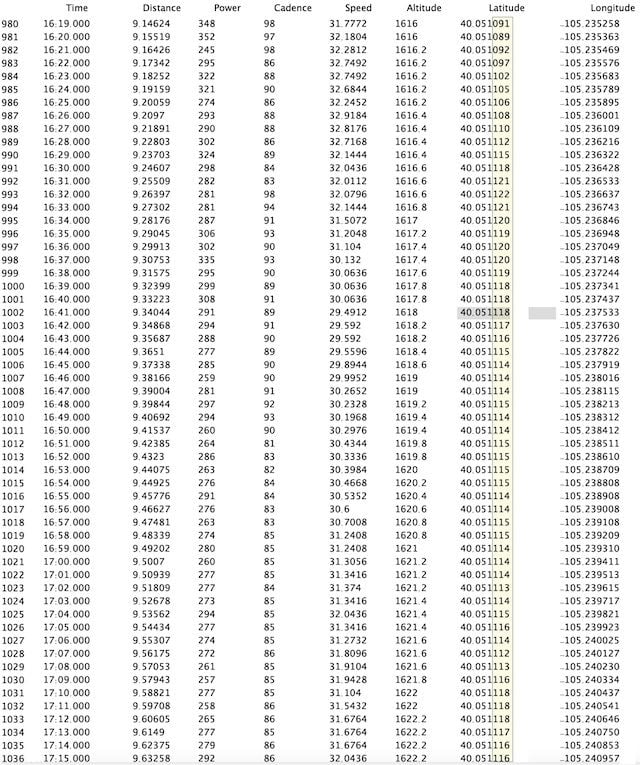
You can easily see this lower error if you look at the raw data from a GPS file. Below is a screen shot taken from the last ride I did, showing a ~ 0.5 km segment where I turned from a southwest heading and rode almost due west. (The latitude and longitude data are in degrees, and I've yellow highlighted the last three digits of the latitude data.). Once I was riding west (at about 16:30), the latitude should have remained unchanged, which it pretty much did. What's more interesting though, is how low the scatter is. You can see that the point-to-point differences are about 0.000001 degrees, which corresponds to 11 cm in distance, almost 50x better than the absolute accuracy of GPS measurements.
If you assume the uncertainty of the longitude measurements are roughly the same as the latitude measurements, the relative distance uncertainty from point-to-point is about 1.7%, as the distance between points is about 9 m. This is not nearly as good as a wheel sensor, which can reach about 0.1% relative uncertainty. But, the wheel sensor will have the same relative uncertainty over the full 0.5 km segment, whereas the uncertainty of the GPS system drops to about .03% over that distance.
Last edited by tomato coupe; 01-29-21 at 02:54 PM.
01-29-21, 02:35 PM
#64
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
01-29-21, 03:06 PM
#65
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
Elevation measurements via pressure transducer are prone to long term drift, whereas GPS is not. The breakpoint where GPS becomes the better option is usually at times longer than the average bike ride, however, which is why GPS-based computers universally use a pressure transducer for elevation measurements.
And issues outside use on a bicycle are something else (not really relevant to what's being discussed).
Last edited by njkayaker; 01-29-21 at 03:11 PM.
01-29-21, 03:55 PM
#67
Senior Member
I ride in suburban Chicago's North Shore - that is, on fairly straight roads and MUPS with lots of trees. The GPSes I've used have been much less accurate than wheel sensors. I say that based on riding a few routes again and again over many years, using 3 sets of computers - Cateye (failed), Sigma (fell out of mount when I was not paying attention), & Lezyne w/Wahoo sensor. The 3 sensors all report essentially the same distances for my routes, and they are essentially the same as Strava's distances for the routes. Using a GPS in a Samsung Galaxy, I saw almost 10% less distance reported. The Lezyne was a good deal better, but it's better still with the sensor.
I KNOW I'm only one data point. I could be wrong, but I'll stick with what the sensor tells me. If I rode along a coast or in a desert, I'd expect the GPS to approach the accuracy of a sensor.
If I had a military GPS, I might find different results ... or are consumer GPSes no longer hobbled?
I KNOW I'm only one data point. I could be wrong, but I'll stick with what the sensor tells me. If I rode along a coast or in a desert, I'd expect the GPS to approach the accuracy of a sensor.
If I had a military GPS, I might find different results ... or are consumer GPSes no longer hobbled?
01-29-21, 05:52 PM
#68
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
No, the amount of error in GPS measurements of elevation is too large for gain. It's poor for elevation gain.
The drift is slower than the changes being measured for elevation gain. Anyway, what is the magnitude of the drift?
And issues outside use on a bicycle are something else (not really relevant to what's being discussed).
The drift is slower than the changes being measured for elevation gain. Anyway, what is the magnitude of the drift?
And issues outside use on a bicycle are something else (not really relevant to what's being discussed).
01-30-21, 08:19 AM
#69
Senior Member

Join Date: Apr 2011
Location: Alpharetta, GA
Posts: 15,280
Bikes: Nashbar Road
Mentioned: 71 Post(s)
Tagged: 0 Thread(s)
Quoted: 2934 Post(s)
Liked 341 Times
in
228 Posts
In contrast, there is no accumulated error from the wired bike computer other than calibration. That error is, as you implied, linear with respect to the total line distance. If it's off by .1% for instance, the entire distance is off by .1%. I'm not sure if that's what you meant by "accumulated linear error" (to me that implies a linear error accumulated geometrically)
4) If a GPS-based computer is used with a speed sensor, there's no reason it couldn't measure distance as well as a wired computer at short distances, but I don't know if they use speed sensor data when they calculate distance.
01-30-21, 10:13 AM
#70
Senior Member
If distances are the same but average speeds are way different, it's likely due to how the 'time stopped' is computed. Sometimes it counts anything below a certain speed as 'stopped' for instance if you go below 2 mph. Or, it may continue to add time for several minutes after you've stopped. Once I parked my bike next to an electric fence and the pulses in the fence were sensed as wheel rotations by the computer and compiled about a quarter mile over 20 minutes. That really screwed up my average!
01-30-21, 12:00 PM
#71
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
That error is, as you implied, linear with respect to the total line distance. If it's off by .1% for instance, the entire distance is off by .1%. I'm not sure if that's what you meant by "accumulated linear error" (to me that implies a linear error accumulated geometrically)
It's actually the GPS that accumulates errors linearly ...
01-30-21, 01:21 PM
#72
Senior Member
Join Date: Sep 2007
Location: Far beyond the pale horizon.
Posts: 14,278
Mentioned: 31 Post(s)
Tagged: 0 Thread(s)
Quoted: 4260 Post(s)
Liked 1,363 Times
in
945 Posts
Yes, the difference from the real value will accumulate.
People have pointed out the first thing. And the second is obvious.
I suspect people thought you were talking about something else.
In any case, it’s still not clear which is generally more accurate for a bicycle ride.
The Garmins determine the circumference at the start of every ride (which is, I suppose, what you were getting at with the “GPS and wheel sensor is more accurate” thing).
Last edited by njkayaker; 01-30-21 at 01:28 PM.
02-01-21, 08:50 AM
#73
Senior Member
Join Date: Apr 2011
Location: Alpharetta, GA
Posts: 15,280
Bikes: Nashbar Road
Mentioned: 71 Post(s)
Tagged: 0 Thread(s)
Quoted: 2934 Post(s)
Liked 341 Times
in
228 Posts
I think yes, it does double the error with double the distance when you use GPS only. GPS smooths the small curving path into more straight lines. That does add up linearly with distance. I'm talking about both the serpentine path that your bike takes, and the larger radius curves. GPS only estimate that. In addition, many GPS errors accumulate from other sources as well, and you'll see jagged paths for instance.
02-01-21, 09:39 AM
#74
Senior Member
Join Date: Dec 2010
Location: northern Deep South
Posts: 8,904
Bikes: Fuji Touring, Novara Randonee
Mentioned: 36 Post(s)
Tagged: 0 Thread(s)
Quoted: 2604 Post(s)
Liked 1,933 Times
in
1,213 Posts
The GPS has both systemic and random errors. One sigma random error on GPS location is about +/- 30 feet at an unobstructed (no trees or overpasses) or multipath (no tall buildings or steel bridges nearby) location. It's possible to do some post-processing to affect how that random error accumulates, but that processing can result in a computed path that's either longer or shorter than the real path taken by the device.
Multipath errors will not, in general, increase the distance.
You also don't know what the wheel sensor error is, or whether the error is positive or negative.
Actually, the correct number is about half of that, at 5m. But, this is for absolute accuracy, which is not the important figure for a bike computer.
1. Spec sheet, not advertising blurb. It’s as easy for a manufacturer to make an unsupported advertising claim as it is for me to claim to be the most ruggedly handsome, charming, and erudite poster here. Only the latter claims are true.

2. Settle time less than, shall we say, 2 minutes to meet the specified accuracy?
3. No differential GPS allowed. I don’t ride my bike around a golf course.
4. Consumer grade implies no aerospace, military, or surveying instruments. Let’s keep the price tag under $1,000.
Errors in the absolute position come from several sources, including ionospheric effects, timing errors, multipath signals, reference clock drift, ephemeris errors, etc. Luckily, however, the largest contributors to the error budget are slowly varying effects, which means they essentially become common mode errors for closely spaced measurements. In other words, two adjacent positions may be off by 5 m, but they're both off by the same amount in the same direction. That's why your GPS computer does not show you bouncing around � 5 m every second when you're sitting at a stop light. It might put your position a few meters off the road, or partially into the intersection, but the point-to-point position is relatively stable. As a consequence, the distance calculated between two adjacent points will have an uncertainty much less (about 0.5 m) than the absolute uncertainty of the GPS readings.
02-01-21, 11:39 AM
#75
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
I think yes, it does double the error with double the distance when you use GPS only. GPS smooths the small curving path into more straight lines. That does add up linearly with distance. I'm talking about both the serpentine path that your bike takes, and the larger radius curves. GPS only estimate that. In addition, many GPS errors accumulate from other sources as well, and you'll see jagged paths for instance.