


Bike Computer Accuracy
 02-01-21, 12:14 PM
02-01-21, 12:14 PM
#76
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
Originally Posted by pdlamb
Originally Posted by tomato coupe
Multipath errors will not, in general, increase the distance.
Originally Posted by pdlamb
I’ll accept the correction if you can direct me to a specification for a consumer-grade GPS with that figure.
"GPS drift, is the difference between your actual location and the location recorded by a GPS receiver. Consumer grade GPS receivers (such as the ones Garmin makes) are not 100% accurate, this will usually cause a difference between your actual location and your recorded location. The GPS location accuracy of Garmin fitness devices is around 3 meters (10 feet), 95% of the time. This means, at any given time, your device will save your location within 3 meters of your actual location."
I think they're a little optimistic. You missed the most important part anyway: "Actually, the correct number is about half of that, at 5m. But, this is for absolute accuracy, which is not the important figure for a bike computer."
Originally Posted by pdlamb
Originally Posted by tomato coupe
Errors in the absolute position come from several sources, including ionospheric effects, timing errors, multipath signals, reference clock drift, ephemeris errors, etc. Luckily, however, the largest contributors to the error budget are slowly varying effects, which means they essentially become common mode errors for closely spaced measurements. In other words, two adjacent positions may be off by 5 m, but they're both off by the same amount in the same direction. That's why your GPS computer does not show you bouncing around � 5 m every second when you're sitting at a stop light. It might put your position a few meters off the road, or partially into the intersection, but the point-to-point position is relatively stable. As a consequence, the distance calculated between two adjacent points will have an uncertainty much less (about 0.5 m) than the absolute uncertainty of the GPS readings.
Originally Posted by pdlamb
After I get through calibrating the wheel sensor, I do know the magnitude and sign of the error.
Last edited by tomato coupe; 02-01-21 at 12:28 PM.
 02-01-21, 01:20 PM
02-01-21, 01:20 PM
#77
Senior Member

Join Date: Apr 2011
Location: Alpharetta, GA
Posts: 15,280
Bikes: Nashbar Road
Mentioned: 71 Post(s)
Tagged: 0 Thread(s)
Quoted: 2934 Post(s)
Liked 341 Times
in
228 Posts
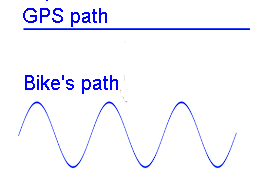
The other type of GPS error, the jagged path, also accumulates linearly. But I intermittently see that, so I don't describe it as characteristic.
This is what I mean. Exaggerated obviously, but when the bike's actual movement has a series of curves, and the GPS takes discrete measurements at periodic points along the curves. The distances are different, even though the end points are the same.
Last edited by wphamilton; 02-01-21 at 01:29 PM.
02-01-21, 01:27 PM
#78
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
02-01-21, 06:59 PM
#79
Senior Member
Join Date: Dec 2010
Location: northern Deep South
Posts: 8,904
Bikes: Fuji Touring, Novara Randonee
Mentioned: 36 Post(s)
Tagged: 0 Thread(s)
Quoted: 2604 Post(s)
Liked 1,933 Times
in
1,213 Posts
02-01-21, 07:32 PM
#80
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
Originally Posted by pdlamb
After I get through calibrating the wheel sensor, I do know the magnitude and sign of the error.
02-02-21, 11:20 AM
#81
Hear myself getting fat

Join Date: Jul 2011
Location: Inland Northwest
Posts: 754
Bikes: Sir Velo A Sparrow
Mentioned: 1 Post(s)
Tagged: 0 Thread(s)
Quoted: 335 Post(s)
Liked 265 Times
in
134 Posts
I was booking down the highway in the little ring, as I do from time to time, and a trucker I was drafting kept putting fingers out his window to let me know my speed.
Later me and my buddy Kelly L. tore up a bowling alley.
Likes For aplcr0331:
02-03-21, 06:09 AM
#82
Senior Member
Join Date: Apr 2011
Location: Alpharetta, GA
Posts: 15,280
Bikes: Nashbar Road
Mentioned: 71 Post(s)
Tagged: 0 Thread(s)
Quoted: 2934 Post(s)
Liked 341 Times
in
228 Posts
The distances interpolated by GPS are also reduced by cutting corners due to the sampling frequency (best case for Garmin is 1 per second I believe).
If anyone is turned off by all the theory and math, it's pretty easy to compare precisions for yourself. Ride the same route a number of times and see how the GPS distance estimate varies, and compare that with how much the wheel sensor distance varies. Look at the measured track if it's available, and how much it varies from your actual path.
02-03-21, 02:34 PM
#83
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
If anyone is turned off by all the theory and math, it's pretty easy to compare precisions for yourself. Ride the same route a number of times and see how the GPS distance estimate varies, and compare that with how much the wheel sensor distance varies. Look at the measured track if it's available, and how much it varies from your actual path.
Mean distance = 29.794 � 0.017 mi. (Actually computed from 20 rides)
So, the relative uncertainty is at the 0.06% level.
-----------------------

-----------------------
-----------------------
-----------------------
-----------------------
-----------------------
-----------------------
-----------------------
-----------------------
 02-03-21, 03:56 PM
02-03-21, 03:56 PM
#84
Senior Member
Join Date: Dec 2010
Location: northern Deep South
Posts: 8,904
Bikes: Fuji Touring, Novara Randonee
Mentioned: 36 Post(s)
Tagged: 0 Thread(s)
Quoted: 2604 Post(s)
Liked 1,933 Times
in
1,213 Posts
You're talking about 2 different things. He means (multipath) errors due to the different paths a GPS signal might take from satellites. There are various smoothing algorithms to deal with those kinds of outliers, but the result is always an approximation of course. You're talking about errors in the track of the bike's path. Your observation is more important than his, to the question of measuring the path length of the bike's travel btw.
02-03-21, 04:10 PM
#85
Senior Member
Join Date: Dec 2010
Location: northern Deep South
Posts: 8,904
Bikes: Fuji Touring, Novara Randonee
Mentioned: 36 Post(s)
Tagged: 0 Thread(s)
Quoted: 2604 Post(s)
Liked 1,933 Times
in
1,213 Posts
(That is what you mean by your user name, isn't it? A coupe is an old car, and a car the color of an old tomato is going to be rusty, so your user name implies an old, rusty car -- what we often call a "rust bucket.")
Anyway, back on topic:
After I get through calibrating the wheel sensor, I do know the magnitude and sign of the error.
Now perhaps I don't understand what you mean by "measurement error." But I really don't want to get into an "Alice in Wonderland" kind of situation where I have to worry about what Humpty Dumpty meant every time I read someone else's words.
02-03-21, 04:12 PM
#86
Senior Member
Several years ago, with a Samsung Galaxy S5, 2 rides on sunny, windy days on tree-lined streets: Sigma wired computer read something like 5.01 and 5.05 miles. The Samsung read 4.5 and 4.9 miles. Strava said maybe 5.02 miles.
The GPS was 2 for 2, and in one case it was wildly wrong. I don't know for a fact that it would have failed again, but it wasn't worth the effort to run the test. Besides, even if it started measuring correctly, how would I know? In any case, it's known that trees with leaves can interfere with GPS signals. Anyone who rides under trees and wants an accurate odometer is more likely to be satisfied with a sensor than with a GPS alone.
And that means: if you want an accurate odometer and can't be sure of where you're riding, you're more likely to be satisfied with a sensor than with a GPS. Of course, you've got to remain aware that there will always be some fuzziness in what the sensor reports, too - it's just likely to be less than what a consumer-level GPS reports.
The GPS was 2 for 2, and in one case it was wildly wrong. I don't know for a fact that it would have failed again, but it wasn't worth the effort to run the test. Besides, even if it started measuring correctly, how would I know? In any case, it's known that trees with leaves can interfere with GPS signals. Anyone who rides under trees and wants an accurate odometer is more likely to be satisfied with a sensor than with a GPS alone.
And that means: if you want an accurate odometer and can't be sure of where you're riding, you're more likely to be satisfied with a sensor than with a GPS. Of course, you've got to remain aware that there will always be some fuzziness in what the sensor reports, too - it's just likely to be less than what a consumer-level GPS reports.
02-03-21, 06:04 PM
#87
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
Yeah, cell phones aren't very good bike computers. No news there.
02-03-21, 06:29 PM
#88
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
When I calibrate something, I compare the measurement of the device (the wheel sensor plus whatever's counting wheel revolutions) to a known standard (like a surveyed distance). If I ride a surveyed distance of 5 miles, and my device reads 4.97 miles, its accuracy is -0.6%. 0.6% => magnitude, negative => it measures less than the standard.
Calibrating your rollout by riding a well known long distance is a good thing, because it can (potentially) reduce the calibration error. It cannot, however, completely eliminate calibration error.
In your example, you've simply determined that the new calibration differs from the previous calibration. The new calibration may or may not be more accurate � it depends on the details of how the two calibrations were made.
02-03-21, 06:35 PM
#89
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
Where multipath causes problems is (mainly) in cities, where you'll also get some signals blocked by the buildings in addition to buildings reflecting the signal. Say you've got 7 satellites visible, three pretty close to the direction of 7th St. (where you're riding), two to the north, and two to the south. The block-long tall building on the north side blocks the signals from the satellites to the north, and a shorter building blocks line of sight to the southern satellites. The three in your LOS let your GPS know you're between Walnut and Maple Streets. They can't triangulate well from north to south. But signals from the southern satellites bounce off the building on the north side of the street before getting to your GPS (multipath), indicating you're farther away from the satellites, and therefore farther north. It's possible your GPS will conclude you crossed Walnut, went up an alley to 6th or even to 5th St., and then sprinted back to 7th when you get to the end of the block. You speed demon cyclist, you just rode three blocks while your wheel sensor went one block!
02-03-21, 07:03 PM
#90
Senior Member
Join Date: May 2020
Posts: 490
Mentioned: 0 Post(s)
Tagged: 0 Thread(s)
Quoted: 252 Post(s)
Liked 67 Times
in
48 Posts
I read above here that GPS has 10-15 feet (3-5 meters) accuracy. But when I zoom into the track that GPS draws on the map, it shows me consistently on the right side of the road, only some places it may occasionally show me as having gone in the ditch or something like that. I think it is quite precise, within maybe a meter or perhaps even a bit less (3 feet or less).
But the GPS measured speed, as when you look at your phone (I don't use cyclocomputer but phone that I sometimes mount on the bars) as on a speedometer, it is or it seems to be laggy. I never get a feeling from it that it is accurate. it probably shows some average speed I had some ten or fifteen seconds earlier.
So now I bought computer that uses those strap on sensors for speed and cadence (not a sensor coupled to a magnet). The 'speed' sensor goes on the wheel hub. I am wondering if it will work in vertical position when it is strapped on the wheel spokes right next to the hub, say hidden behind cassette (I suppose normally it would be on the front wheel?). For one thing, my hubs are conical in shape and also the sensor would look neater if strapped on the spokes.
I guess it depends what's inside the sensor, how it detects the wheel turns. It is probably some mechanical system, like a metal ball enclosed in the sensor body that 'falls' and closes a contact every time it is 'upside down' (or it may be a mercury contact)? This repeated opening and closing of an electric circuit is then broadcasted via BTooth to the computer. However this quote talks something about 'error rate from sensor' which goes against my logic where the computer simply counts wheel turns, each turn one signal 'click'.
But the GPS measured speed, as when you look at your phone (I don't use cyclocomputer but phone that I sometimes mount on the bars) as on a speedometer, it is or it seems to be laggy. I never get a feeling from it that it is accurate. it probably shows some average speed I had some ten or fifteen seconds earlier.
So now I bought computer that uses those strap on sensors for speed and cadence (not a sensor coupled to a magnet). The 'speed' sensor goes on the wheel hub. I am wondering if it will work in vertical position when it is strapped on the wheel spokes right next to the hub, say hidden behind cassette (I suppose normally it would be on the front wheel?). For one thing, my hubs are conical in shape and also the sensor would look neater if strapped on the spokes.
I guess it depends what's inside the sensor, how it detects the wheel turns. It is probably some mechanical system, like a metal ball enclosed in the sensor body that 'falls' and closes a contact every time it is 'upside down' (or it may be a mercury contact)? This repeated opening and closing of an electric circuit is then broadcasted via BTooth to the computer. However this quote talks something about 'error rate from sensor' which goes against my logic where the computer simply counts wheel turns, each turn one signal 'click'.
Last edited by vane171; 02-03-21 at 07:21 PM.
02-04-21, 09:03 AM
#91
Senior Member
Join Date: Dec 2010
Location: northern Deep South
Posts: 8,904
Bikes: Fuji Touring, Novara Randonee
Mentioned: 36 Post(s)
Tagged: 0 Thread(s)
Quoted: 2604 Post(s)
Liked 1,933 Times
in
1,213 Posts
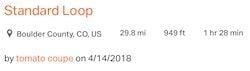
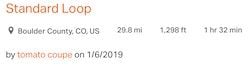
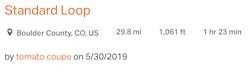
Here you go ... 10 rides on the same route, logged on a Garmin Edge 520 without a wheel sensor. The starting point probably varied by about 20 feet, and the finishing point by about 5 feet. If you dig into the files, you can extract a couple more digits for the distance, and compute some basic statistics:
Mean distance = 29.794 � 0.017 mi. (Actually computed from 20 rides)
So, the relative uncertainty is at the 0.06% level.
Mean distance = 29.794 � 0.017 mi. (Actually computed from 20 rides)
So, the relative uncertainty is at the 0.06% level.
02-04-21, 10:59 AM
#92
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
02-04-21, 06:43 PM
#93
Senior Member
Yeah, cell phones aren't very good bike computers. No news there.
I apologize, though. I mistook you for someone who wanted to cast light on the subject of this thread.
02-04-21, 07:45 PM
#94
Senior Member
Join Date: Jul 2009
Posts: 5,951
Bikes: Colnago, Van Dessel, Factor, Cervelo, Ritchey
Mentioned: 5 Post(s)
Tagged: 0 Thread(s)
Quoted: 3952 Post(s)
Liked 7,299 Times
in
2,947 Posts
Sorry, I meant that cell phones make fantastic bike computers. (Is that what you want to hear?)
02-04-21, 10:36 PM
#95
Senior Member
Millions - maybe 10s, maybe 100s of millions - people rely on their phones' GPSes every day. I expect there are far more phone GPSes around than car, truck, boat, hike, and bike GPSes combined. My bet is that phone GPSes are what most people think of when they read or hear 'GPS'. And here you are dissing phone GPSes on one hand and arguing that GPSes are more accurate than sensors on the other. That's a contradiction that I really didn't expect.
You can have the last word.
I really hate over-generalizations.
You can have the last word.
I really hate over-generalizations.
02-05-21, 09:49 AM
#96
Senior Member
A bike forum? You didn't really think anyone needed the reminder, did you?
The topic is GPS accuracy in general, and one of the sub-topics is GPS alone vs sensor-based speed and distance accuracy. My own few observations tell me sensor-based reporting is more accurate than GPS alone. That's based on 3 GPSes - 2 phones and one Lezyne GPS unit. I didn't do extensive testing, because the first few tests with each were so telling.
One poster states categorically that GPSes are more accurate. I have no doubt that it's true under certain circumstances, but it's just not true under all conditions, so the statement is false. It's an over-generalization.
A GPS may sometimes be more accurate than a sensor-based system. Sometimes it's less accurate. If you know the conditions in which you ride, you have a good chance of picking the method that will be more accurate. If you don't have that knowledge, you'll probably get more accuracy from a wired, sensor-based system than from a wireless sensor or a naked GPS.
It matters not what package the GPS comes in ... but don't forget that many cyclists rely on their phones for GPS services.
The topic is GPS accuracy in general, and one of the sub-topics is GPS alone vs sensor-based speed and distance accuracy. My own few observations tell me sensor-based reporting is more accurate than GPS alone. That's based on 3 GPSes - 2 phones and one Lezyne GPS unit. I didn't do extensive testing, because the first few tests with each were so telling.
One poster states categorically that GPSes are more accurate. I have no doubt that it's true under certain circumstances, but it's just not true under all conditions, so the statement is false. It's an over-generalization.
A GPS may sometimes be more accurate than a sensor-based system. Sometimes it's less accurate. If you know the conditions in which you ride, you have a good chance of picking the method that will be more accurate. If you don't have that knowledge, you'll probably get more accuracy from a wired, sensor-based system than from a wireless sensor or a naked GPS.
It matters not what package the GPS comes in ... but don't forget that many cyclists rely on their phones for GPS services.
Last edited by philbob57; 02-05-21 at 10:01 AM.
02-05-21, 10:40 AM
#97
Senior Member
Join Date: Dec 2011
Location: Layton, UT
Posts: 1,606
Bikes: 2011 Bent TW Elegance 2014 Carbon Strada Velomobile
Mentioned: 6 Post(s)
Tagged: 0 Thread(s)
Quoted: 626 Post(s)
Liked 701 Times
in
418 Posts
Also note that there are power saving settings in phones that allow for less accurate GPS readings to save power. Some phones, this is automatic depending on if the phone is plugged in, below a certain battery percent, or possibly other factors, so that's one thing to check as well.
02-05-21, 11:10 AM
#98
Senior Member
Join Date: Dec 2011
Location: Layton, UT
Posts: 1,606
Bikes: 2011 Bent TW Elegance 2014 Carbon Strada Velomobile
Mentioned: 6 Post(s)
Tagged: 0 Thread(s)
Quoted: 626 Post(s)
Liked 701 Times
in
418 Posts
From a max speed standpoint the accuracy difference between GPS and the wheel sensor is interesting.
Yesterday my kid slapped one of my speed sensors on his mountain bike. Entered the circumference of the tire, while weighted.
Strava, which disregards speed sensor data, showed 49 mph top speed. Garmin Connect, which reflects speed sensor data, showed 50.9mph.
Yesterday my kid slapped one of my speed sensors on his mountain bike. Entered the circumference of the tire, while weighted.
Strava, which disregards speed sensor data, showed 49 mph top speed. Garmin Connect, which reflects speed sensor data, showed 50.9mph.
My favorite speed run around is about 1/2 mile straight with a 50 mph speed limit that I always exceed.
 I typically hit speeds in the mid 60s as indicated by my wired wheel sensor, whereas the GPS (on a phone no less) rarely goes above 49-52. The wierd thing is, I can hold 65-68 mph for at least a couple yards of that run, but the GPS still lags enough that it 'smooths' out that top speed quite a bit. On my more normal routes, the smoothing is much less noticeable, usually within 3-4 mph peak.
02-05-21, 11:15 AM
I typically hit speeds in the mid 60s as indicated by my wired wheel sensor, whereas the GPS (on a phone no less) rarely goes above 49-52. The wierd thing is, I can hold 65-68 mph for at least a couple yards of that run, but the GPS still lags enough that it 'smooths' out that top speed quite a bit. On my more normal routes, the smoothing is much less noticeable, usually within 3-4 mph peak.
02-05-21, 11:15 AM
#99
Senior Member
Join Date: Apr 2011
Location: Alpharetta, GA
Posts: 15,280
Bikes: Nashbar Road
Mentioned: 71 Post(s)
Tagged: 0 Thread(s)
Quoted: 2934 Post(s)
Liked 341 Times
in
228 Posts
Here you go ... 10 rides on the same route, logged on a Garmin Edge 520 without a wheel sensor. The starting point probably varied by about 20 feet, and the finishing point by about 5 feet. If you dig into the files, you can extract a couple more digits for the distance, and compute some basic statistics:
Mean distance = 29.794 � 0.017 mi. (Actually computed from 20 rides)
So, the relative uncertainty is at the 0.06% level.
Mean distance = 29.794 � 0.017 mi. (Actually computed from 20 rides)
So, the relative uncertainty is at the 0.06% level.
- Make sure you're not selecting among the different rides. Use all of them that are applicable.
- It's good to select from a given time frame, and not from a given distance, type of ride etc. Same reason as above, and to eliminate variables.
- If you have a "snap to road" option in your software, turn it off for the checks. Snap to road will basically report the map distance, not the bike's true distance.
02-05-21, 11:31 AM
#100
Senior Member
Join Date: Apr 2011
Location: Alpharetta, GA
Posts: 15,280
Bikes: Nashbar Road
Mentioned: 71 Post(s)
Tagged: 0 Thread(s)
Quoted: 2934 Post(s)
Liked 341 Times
in
228 Posts
The faster one goes (and more importantly, the faster one accelerates/decelerates) the more pronounced this effect becomes.
My favorite speed run around is about 1/2 mile straight with a 50 mph speed limit that I always exceed. I typically hit speeds in the mid 60s as indicated by my wired wheel sensor, whereas the GPS (on a phone no less) rarely goes above 49-52. The wierd thing is, I can hold 65-68 mph for at least a couple yards of that run, but the GPS still lags enough that it 'smooths' out that top speed quite a bit. On my more normal routes, the smoothing is much less noticeable, usually within 3-4 mph peak.
My favorite speed run around is about 1/2 mile straight with a 50 mph speed limit that I always exceed.
I typically hit speeds in the mid 60s as indicated by my wired wheel sensor, whereas the GPS (on a phone no less) rarely goes above 49-52. The wierd thing is, I can hold 65-68 mph for at least a couple yards of that run, but the GPS still lags enough that it 'smooths' out that top speed quite a bit. On my more normal routes, the smoothing is much less noticeable, usually within 3-4 mph peak.Short duration speed peaks will disappear due to the smoothing. Wheel sensor devices also do that, because the magnetic switches are noisier than you'd think with some random variation on exactly when in the cycle they activate. But they have a much higher sampling rate than do GPS applications, which is the main reason why that setup is inherently more precise than GPS.